

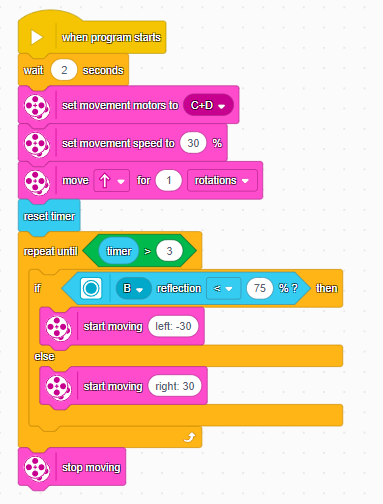
The program controls a spike prime robot equipped with two movement motors (C and D) to follow a black line on a white surface. It uses a light sensor (B) to detect the line and adjusts the robot's movement accordingly
Initialization:
- Waits for 2 seconds when the program starts.
- Sets both movement motors (C and D) to operate.
- Sets the movement speed to 30%.
Line Following Loop:
- Moves the robot forward for 1 rotation.
- Resets a timer.
- Repeats the following until the timer exceeds 3 seconds:
- Checks the light sensor reading (B reflection):
- If the reflection is greater than or equal to 75%, it means the robot is on the white surface (off the line). In this case, it starts moving left at a speed of -30.
- Otherwise, it assumes the robot is on the black line and starts moving right at a speed of 30.
- Checks the light sensor reading (B reflection):
Stopping:
- After the timer exceeds 3 seconds, the robot stops moving